Unit 15: Oscillations
15.1 - Simple Harmonic Motion
Important Stuff to Know
- The frequency, , of periodic, or oscillatory, motion is the number of oscillations per second. In SI units, it is measured in hertz: .
- The period, , is the time required for one complete oscillation, or cycle. It is related to the frequency by .
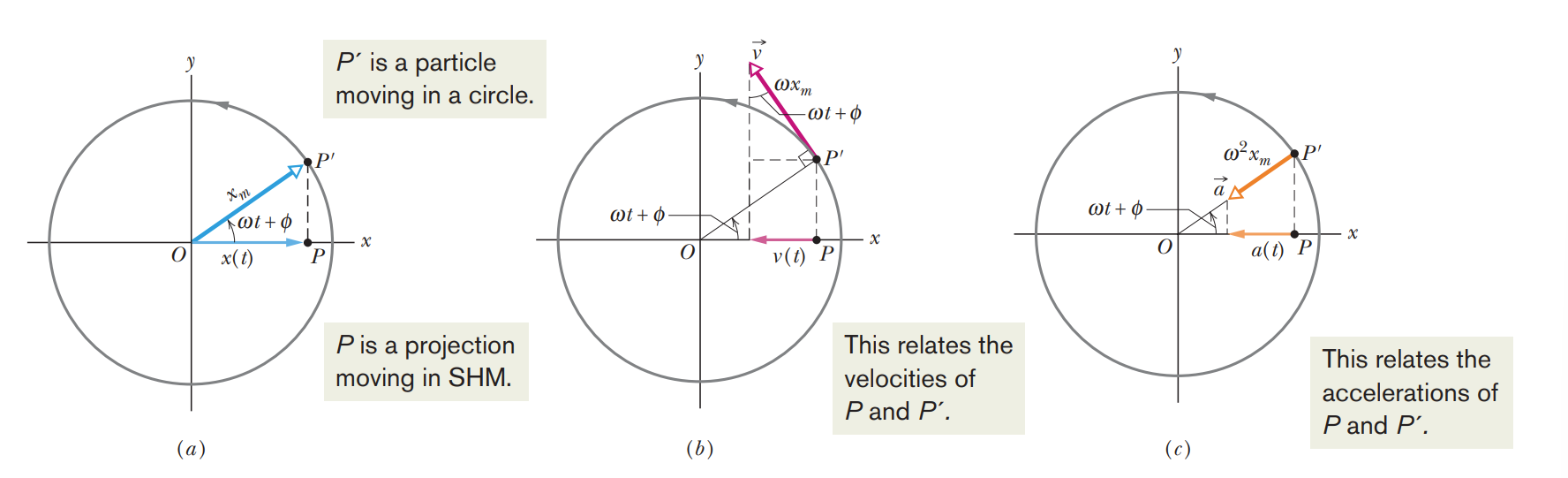
- In simple harmonic motion (SHM), the displacement of a particle from its equilibrium position is described by the equation:
in which is the amplitude of the displacement, is the phase of the motion, and is the phase constant. The angular frequency is related to the period and the frequency of motion by .
- Differentiating leads to equations for the particle's SHM velocity and acceleration as functions of time:
In the velocity function, the positive quantity is the velocity amplitude . In the acceleration function, the positive quantity is the acceleration magnitude .
- A particle with mass that moves under the influence of a Hooke's law restoring force given by is a linear simple harmonic oscillator with:
15.2 - Energy in Simple Harmonic Motion
A particle in simple harmonic motion has, at any time, kinetic energy and potential energy . If no friction is present, the mechanical energy remains constant even though and change.
Total Energy
15.3 - An Angular Simple Harmonic Oscillator
A torsion pendulum consists of an object suspended by a wire. When the wire is twisted and released, the object oscillates in angular simple harmonic motion with a period given by:
where is the rotational inertia of the spinning object about the axis of rotation and is the torsion constant of the wire.
15.4 - Pendulums, Circular Motion
Simple Pendulum
A simple pendulum consists of a rod of negligible mass that pivots about its upper end, with a particle (the bob) attached at its lower end. If the rod swings through only small angles, its motion is approximately simple harmonic motion with a period given by:
where is the particle's rotational inertia about the pivot, is the particle's mass, and is the rod's length.
Physical Pendulum
A physical pendulum has a more complicated distribution of mass. For small angles of swinging, its motion is simple harmonic motion with a period given by:
where is the pendulum's rotational inertia about the pivot, is the pendulum's mass, and is the distance between the pivot and the pendulum's center of mass.
Relating SHM and UCM
Simple harmonic motion corresponds to the projection of uniform circular motion onto a diameter of the circle.
15.5 - Damped Simple Harmonic Motion
The mechanical energy in a real oscillating system decreases during the oscillations because external forces, such as a drag force, inhibit the oscillations and transfer mechanical energy to thermal energy. The real oscillator and its motion are then said to be damped.
Equations
If the dampening force is given by , where is the velocity of the oscillator and is a dampening constant, then the displacement of the oscillator is given by:
where , the angular frequency of the dampened oscillator, is given by:
If the dampening constant is small (), then , where is the angular frequency of the undampened oscillator. For a small , the mechanical energy of the oscillator is given by:
15.6 - Forced Oscillations and Resonance
- If an external driving force with angular frequency acts on an oscillating system with natural angular frequency , the system oscillates with angular frequency .
- The velocity amplitude of the system is greatest when , a condition called resonance. The amplitude of the system is (approximately) greatest under the same condition.