Unit 11: Rolling, Torque, and Angular Momentum
11.1 - Rolling as Translation and Rotation Combined
For a wheel of radius rolling smoothly,
where is the linear speed of the wheel's center of mass (moving forward), and is the angular speed of the wheel about its center.
Rolling as Pure Rotation
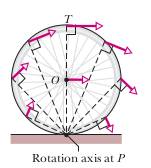
There is another way to look at the rolling motion of a wheel, as pure rotation about an axis which is always at the base of the wheel (where it touches the surface it is rolling on). Rolling motion can be treated as pure rotation passing about that axis, as shown by point in the diagram to the right.
11.2 - Forces and Kinetic Energy of Rolling
A smoothly rolling wheel has kinetic energy defined as:
where is the rotational inertia of the wheel about its center of mass and is the mass of the wheel.
The first term in this equation represents the kinetic energy of the actual rotation of the wheel, while the second term is the linear velocity of the wheel rolling forward.
Linear Acceleration
If the wheel is being accelerated but is still rolling smoothly, the acceleration of the center of mass is related to the angular acceleration about the center with:
Rolling Down a Ramp
If a wheel is rolling smoothly down a ramp of angle , its acceleration along an axis extending up the ramp is:
11.3 - The Yo-Yo
A yo-yo, which travels vertically up or down a string, can be treated as a wheel rolling along an inclined plane at angle .
11.4 - Torque Revisited
In three dimensions, torque is a vector quantity defined relative to a fixed point (usually an origin); it is:
where is a force applied to a particle and is a position vector locating the particle relative to the fixed point.
11.5 - Angular Momentum
The angular momentum of a particle with linear momentum , mass , and linear velocity is a vector quantity defined relative to a fixed point (usually an origin) as:
The magnitude of is given by:
The direction of is given by the right-hand rule: Position your right hand so that the fingers are in the direction of .Then rotate them around the palm to be in the direction of . Your outstretched thumb gives the direction of .
11.6 - Newton's Law in Angular Form
Newton's Second Law can be written in angular form as:
where is the net torque acting on the particle and is the angular momentum of the particle.
11.7 - Angular Momentum of a Rigid Body
The angular momentum, of a system of particles is the vector sum of the angular momenta of the individual particles:
Effect of Torque on a System of Particles
The time rate of change of this angular momentum is equal to the net external torque on the system (the vector sum of the torques due to interactions of the particles of the system with particles external to the system):
Angular Momentum of a Rigid Body Rotating About a Fixed Axis
For a rigid body rotating about a fixed axis, the component of its angular momentum parallel to the rotation axis is:
11.8 - Conservation of Angular Momentum
The angular momentum of a system remains constant if the net external torque acting on the system is zero. Therefore,
in an isolated system. This is the law of conservation of angular momentum.
11.9 - Precession of a Gyroscope
A spinning gyroscope can precess about a vertical axis through its support at the rate:
Where is the gyroscope's mass, is the moment arm, is the rotational inertia, and is the spin rate.
Explanation
In this scenario, the torque causing the downward rotation (causing the gyroscope to fall) changes the angular momentum of the gyroscope, and is caused by the downward force of gravity .