Unit 10: Rotation
10.1 - Rotational Variables
To describe the rotation of a rigid body about a fixed axis, called the rotation axis, we assume a reference line is fixed in the body, perpendicular to that axis and rotating with the body. We measure the angular position of this line relative to a fixed direction. When is measured in radians,
where is the arc length of a circular path of radius and angle .
Radians are related to angular measurements by:
Angular Displacement
A body that rotates about a rotation axis, changing its angular position from to , undergoes an angular displacement:
where is positive for counterclockwise rotation and negative for clockwise rotation.
Angular Velocity
If a body rotates through an angular displacement in a time interval , its average angular velocity is:
The instantaneous rate of change (angular velocity) can thus be represented as:
Both and are vectors, with directions given by a right-hand rule. They are positive for counterclockwise rotation and negative for clockwise rotation. The magnitude of the body’s angular velocity is the angular speed.
Angular Acceleration
If the angular velocity of a body changes from to in a time interval , then the average angular acceleration of the body is
The instantaneous rate of change (angular acceleration) can thus be represented as:
Both and are vectors.
10.2 - Constant Angular Acceleration
There are a bunch of kinematic equations for rotational motion, which can all be found here :)
10.3 - Relating the Linear and Angular Variables
Arc Length
A point in a rigid rotating body, at a perpendicular distance from the rotation axis, moves in a circle with radius . If the body rotates through an angle , the point moves along an arc with length given by
where is in radians.
Linear Velocity
The linear velocity of the point is tangent to the circle; the point's linear speed is given by
where is the angular speed (in radians per second) of the body, and thus also the point.
Linear Acceleration
The linear acceleration of the point has both tangential and radial components. The tangential component is
where is the magnitude of the angular acceleration (in radians per second-squared) of the body. The radial component of is
Period
If the point moves in uniform circular motion, the period of the motion for the point and the body is
10.4 - Kinetic Energy of Rotation
Kinetic Energy of Rotation
The kinetic energy of a rigid body rotating around a fixed axis is given by
in which is the rotational inertia of the body, defined as
for a system of discrete particles.
Rotational Inertia
We call the quantity the rotational inertia (or moment of inertia) I of the body with respect to the axis of rotation. It is a constant for a particular rigid body and a particular rotation axis.
10.5 - Calculating the Rotational Inertia
The rotational inertia of a body can be defined as
for a system of discrete particles, or as
for a body with a continuously distributed mass. The and in these expressions represent the perpendicular distance from the axis of rotation to each mass element in the body, and the integration is carried out over the entire body so as to include every mass element.
Parallel Axis Theorem
The parallel-axis theorem relates the rotational inertia of a body about any axis to that of the same body about a parallel axis through the center of mass:
Here, is the perpendicular distance between the two axes, and is the rotational inertia about the axis through the com. We can describe as being the distance the actual rotation axis has been shifted from the rotation axis through the com.
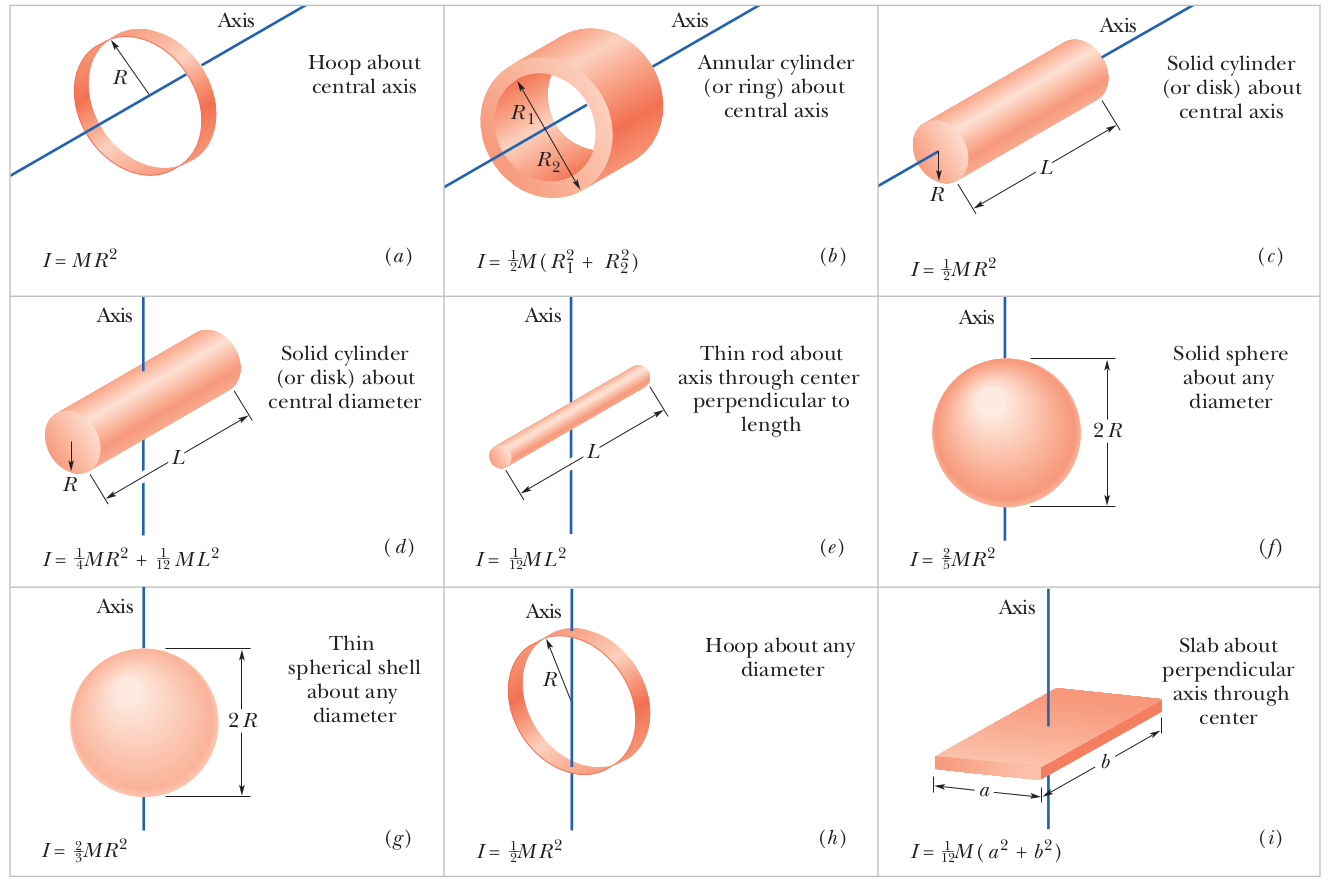
Common Rotational Inertias
10.6 - Torque
Torque is a turning or twisting action on a body about a rotation axis due to a force . If is exerted at a point given by the position vector relative to the axis, then the magnitude of the torque is
where is the component of perpendicular to and is the angle between and . The quantity is the perpendicular distance between the rotation axis and an extended line running through the vector. This line is called the line of action of , and is called the moment arm of . Similarly, is the moment arm of .
The SI unit of torque is the newton-meter (N*m). A torque is positive if it tends to rotate a body at rest counterclockwise and negative if it tends to rotate the body clockwise.
10.7 - Newton's Second Law for Rotation
The rotational equivalent of Newton's second law is:
where is the net torque acting on a particle or rigid body, is the rotational inertia of the particle or body about the rotation axis, and is the resulting angular acceleration about that axis.
10.8 - Work and Rotational Kinetic Energy
The equations used for calculating work and power in rotational motion correspond to equations used for translational motion and are:
Constant Torque
When you have a constant , the integral reduces to:
Work—Kinetic Energy Theorem for Rotating Bodies
The form of the work-kinetic energy theorem used for rotating bodies is: